 400 025 3599
400 025 3599 




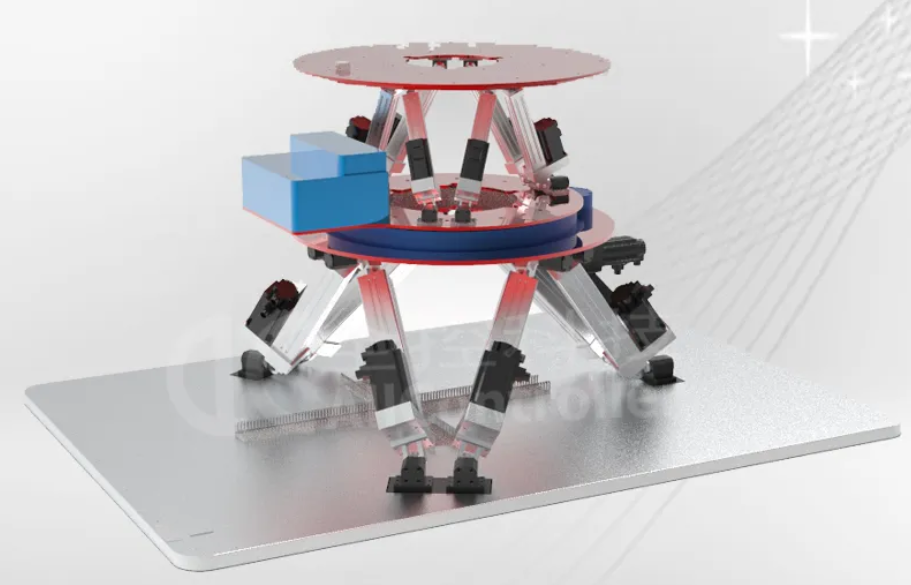
將Stewart平臺鉸接點參數帶入到上述公式中,使用MATLAB求得在初始位姿下,如圖2.22.1所示,六根桿長和設計時的參數一致。
平臺參數為:
l xa 上平臺X軸坐標
l ya 上平臺Y軸坐標
l za = 上平臺Z軸坐標
l xb = 下平臺X軸坐標
l yb = 下平臺Y軸坐標
l zb = 下平臺Z軸坐標
l roumin = 最小桿長
l roumax = 最大桿長
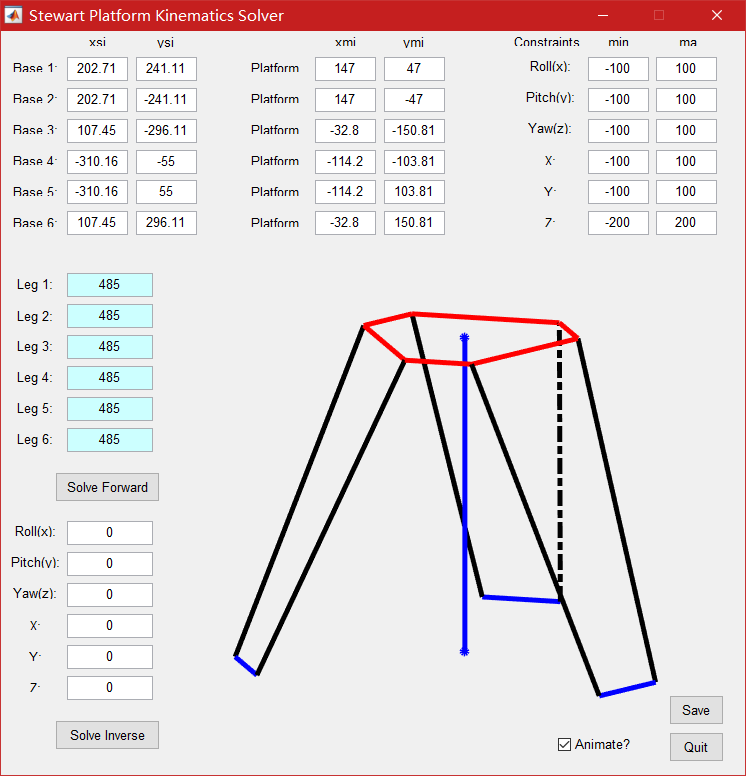 圖2.22.1 初始姿態下平臺各參數
圖2.22.1 初始姿態下平臺各參數
通過修改對應位姿參數,反解得各桿長,如圖2.22.2所示。
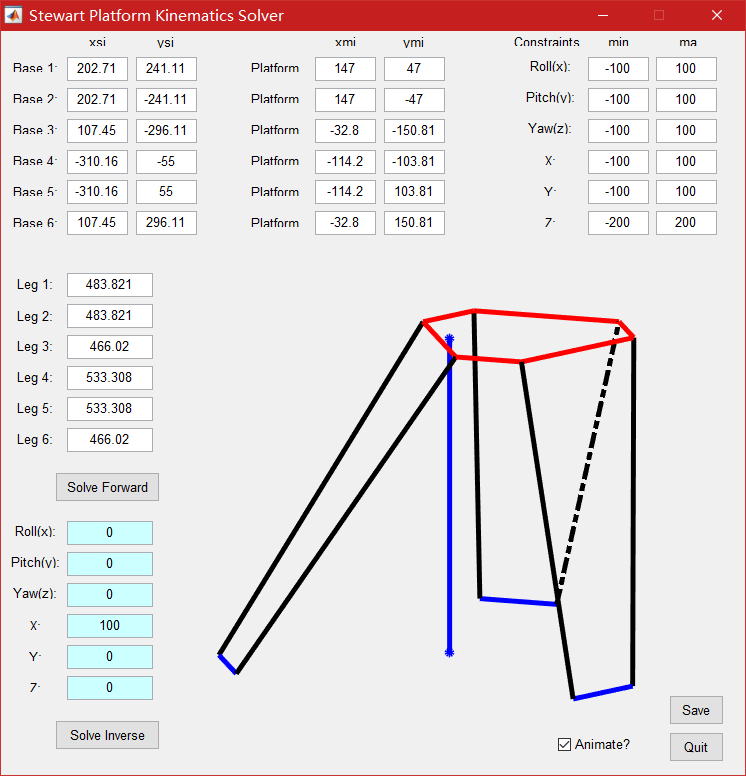
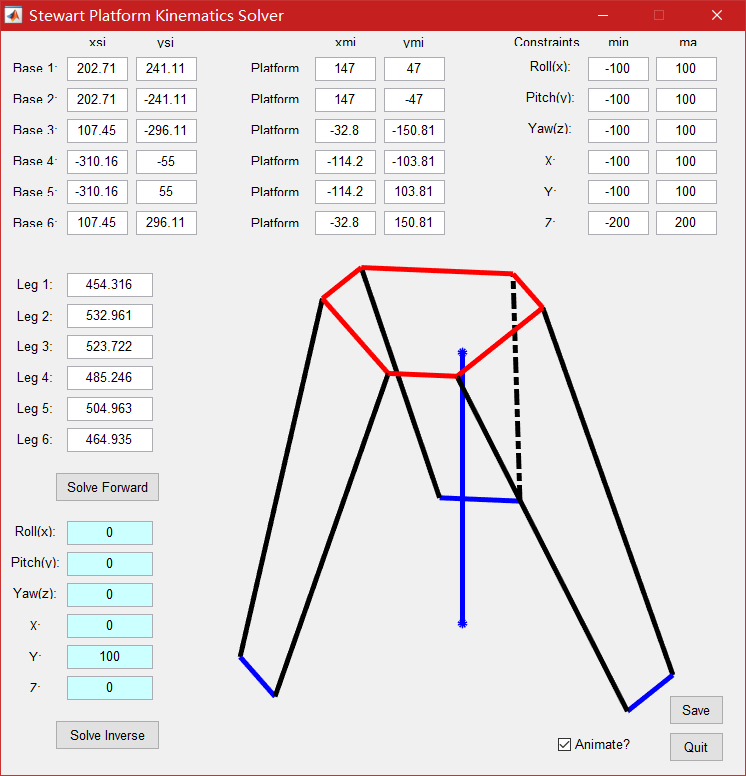

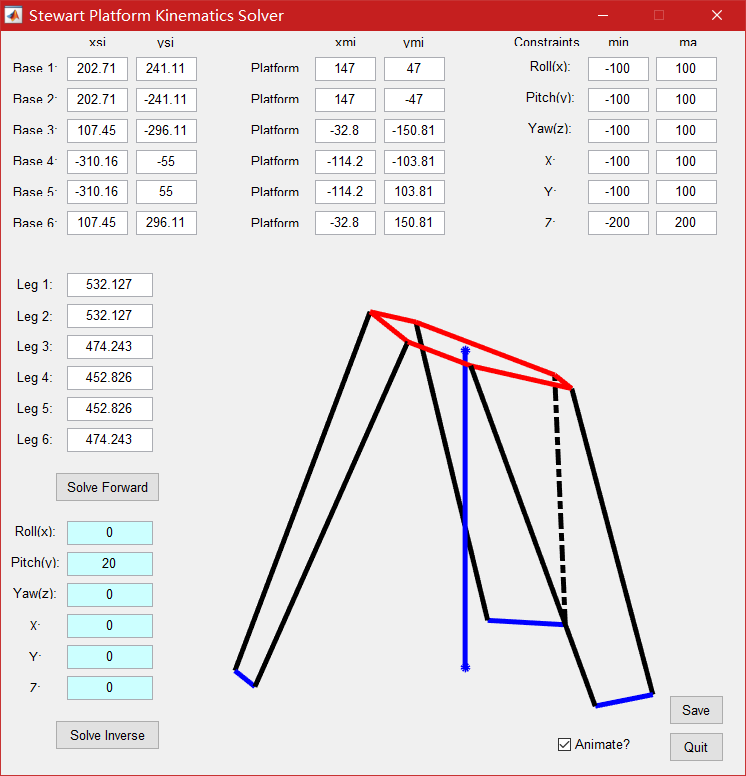
圖2.22.2 不同姿態下平臺各參數
利用MATLAB計算Stewart平臺工作空間,得到工作范圍,如圖2.22.3所示。
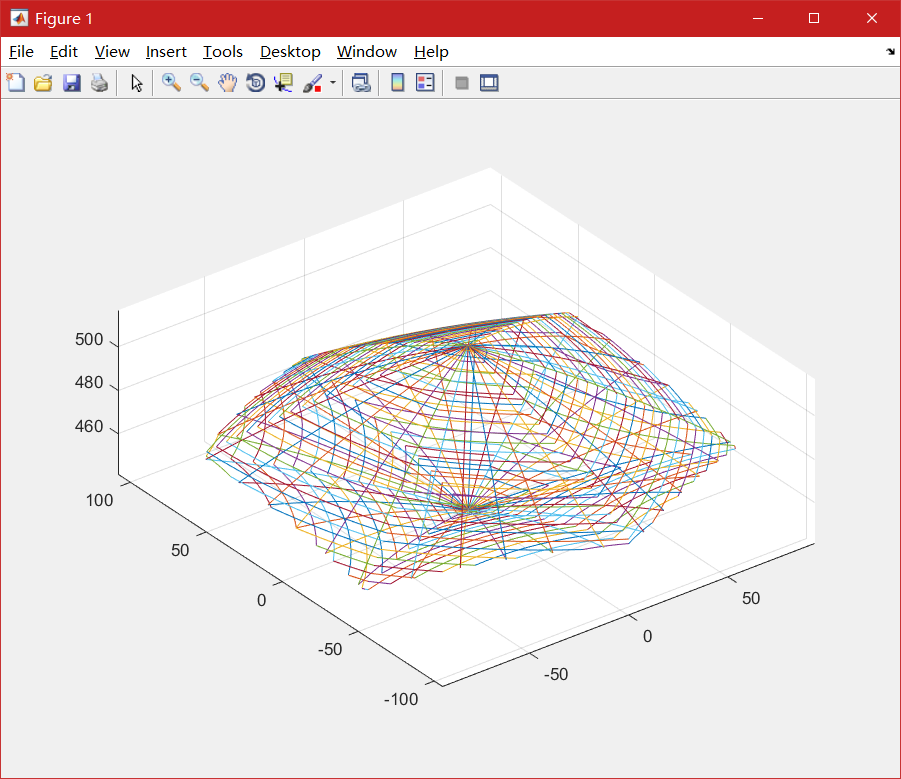 圖2.22.3 平臺工作空間
圖2.22.3 平臺工作空間
平臺參數為:
l xa 上平臺X軸坐標
l ya 上平臺Y軸坐標
l za = 上平臺Z軸坐標
l xb = 下平臺X軸坐標
l yb = 下平臺Y軸坐標
l zb = 下平臺Z軸坐標
l roumin = 最小桿長
l roumax = 最大桿長
通過修改對應位姿參數,反解得各桿長,如圖2.22.2所示。
圖2.22.2 不同姿態下平臺各參數
利用MATLAB計算Stewart平臺工作空間,得到工作范圍,如圖2.22.3所示。
關鍵詞: Matlab,運動學,仿真,軟件,將,Stewart,平臺,






 在線咨詢
在線咨詢 




